Piñón-cremallera
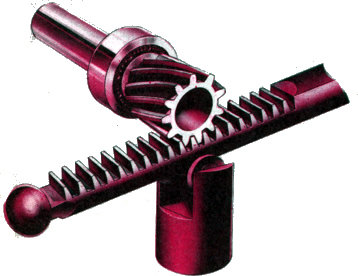
Mecanismo de piñón-cremallera
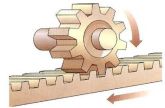
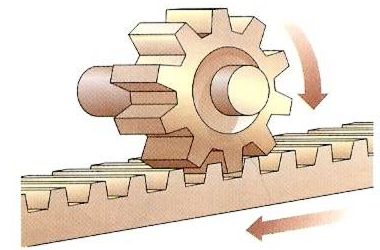
Este mecanismo convierte el movimiento circular de un piñón en uno lineal continuo por parte de la cremallera, que no es más que una barra rígida dentada . Este mecanismo es reversible, es decir, el movimiento rectilíneo de la cremallera se puede convertir en un movimiento circular por parte del piñón. En el primer caso, el piñón al girar y estar engranado a la cremallera, empuja a ésta, provocando su desplazamiento lineal.
Mecanismo de piñón cremallera
Aunque el sistema es perfectamente reversible, su utilidad práctica suele centrarse solamente en la conversión de circular en lineal continuo, siendo muy apreciado para conseguir movimientos lineales de precisión (caso de microscopios u otros instrumentos ópticos como retroproyectores), desplazamiento del cabezal de los taladros sensitivos, movimiento de puertas automáticas de garaje, sacacorchos, regulación de altura de los trípodes, movimiento de estanterías móviles empleadas en archivos, farmacias o bibliotecas, cerraduras..
Cómo se puede observar en el anterior vídeo, podemos resumir que…
- Tipo de mecanismo: Transformación circular a lineal
- Elemento motriz: Piñón, que describe un movimiento circular.
- Elemento conducido: Cremallera, que describe un movimiento lineal.
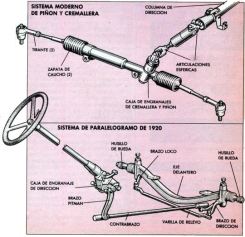
Dirección asistida - Haz clic en el dibujo para ver detalles

Detalle del piñón-cremallera de la dirección asistida
En el siguiente vídeo podrás observar una de sus más extendidas aplicaciones: La dirección asistida. El conjunto de mecanismos que componen el sistema de la dirección tienen la misión de orientar las ruedas delanteras para que el vehículo tome la trayectoria deseada por el conductor. Cuando giras el volante de un automóvil, giras al mismo tiempo un piñón situado en el otro extremo del eje del volante. Este, a su vez, engrana a una cremallera que, al desplazarse, permite el giro de las ruedas que te permiten cambiar la dirección del coche…pero mejor es que observes el vídeo y así comprobarás su funcionamiento.
También podemos encontrar este mecanismo en las vías de los ferrocarriles en lugares en los que existe una gran pendiente en subida. En este caso, se corre el riesgo de que el ferrocarril patine y es por eso que entre las vías se sitúa una cremallera que engrana con una rueda dentada motriz adosada al tren. Evidentemente, al girar, facilita la subida de la fuerte pendiente sin riesgo de deslizamiento.
 En este caso, las vías se encuentran en los alpes suizos, donde los ferrocarriles deben superar la cordillera de Los Alpes, con fuertes pendientes.
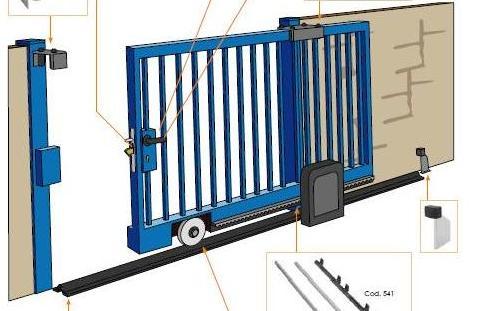
Otra aplicación muy común de este mecanismo la encontramos en las puertas correderas, especialmente de aquellas con acceso a una aparcamiento que se activan con un mando a distancia.
El mando a distancia activa un motor eléctrico cuyo eje lleva acoplado un piñón, mientras que la cremallera está adosada a la puerta. Es obvio que, al girar el piñón, obligamos a la puerta a desplazarse gracias a la cremallera.
En este caso, las vías se encuentran en los alpes suizos, donde los ferrocarriles deben superar la cordillera de Los Alpes, con fuertes pendientes.
Otra aplicación muy común de este mecanismo la encontramos en las puertas correderas, especialmente de aquellas con acceso a una aparcamiento que se activan con un mando a distancia.
El mando a distancia activa un motor eléctrico cuyo eje lleva acoplado un piñón, mientras que la cremallera está adosada a la puerta. Es obvio que, al girar el piñón, obligamos a la puerta a desplazarse gracias a la cremallera.
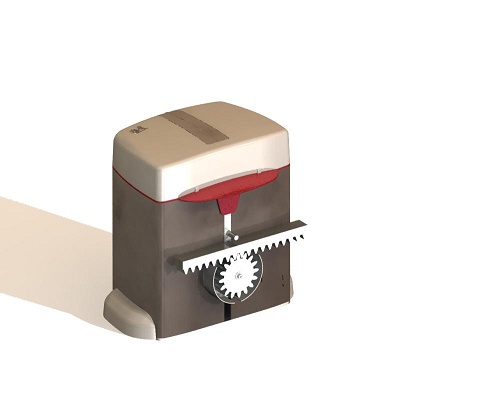
Motor de una puerta corredera
En la imagen de la derecha apreciamos un motor para una puerta corredera de hasta 400 kg. Se puede apreciar como la cremallera (que estaría adosada a la puerta) se sitúa por encima del piñón. De este modo garantizamos el acoplamiento.
En el siguiente esquema apreciamos el conjunto del motor eléctrico (1), la cremallera (2) y el sistema electrónico que permite el control remoto: antena (3), tarjeta sintonizadora (4) y mando a distancia (5).

Puerta corredera
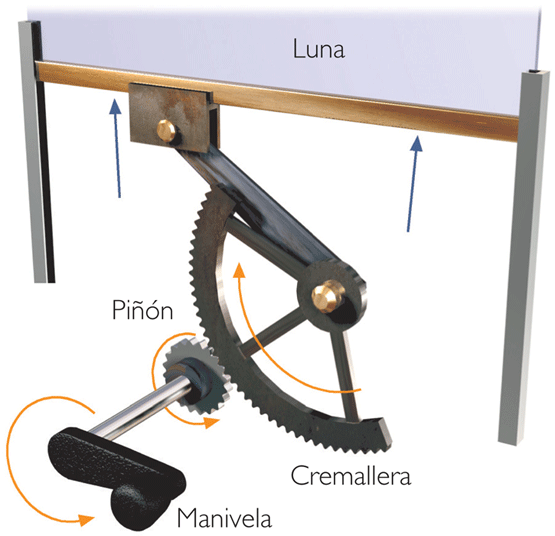
También se puede encontrar este mecanismo en los elevalunas manuales de un automóvil. Cuando queremos subir la ventanilla de nuestro coche, de forma manual, lo que hacemos en realidad es girar, además de la manivela, un piñón acoplado a una cremallera curva que tiene en un extremo una palanca articulada. Una vez más, un movimiento circular se trasnforma en otro lineal que esta vez pertenece a la luna.

 Este mecanismo lo podemos encontrar también en objetos simples y cotidianos como el sacacorchos de la imagen. Este sacacorchos consta de dos palancas que llevan en su extremo un piñón que engrana con una cremallera. Al bajar las palancas, en realidad, obligamos a girar a los piñones los cuales, a su vez, desplazan la cremallera que arrastra el tapón de la botella.
Este mecanismo lo podemos encontrar también en objetos simples y cotidianos como el sacacorchos de la imagen. Este sacacorchos consta de dos palancas que llevan en su extremo un piñón que engrana con una cremallera. Al bajar las palancas, en realidad, obligamos a girar a los piñones los cuales, a su vez, desplazan la cremallera que arrastra el tapón de la botella.

Mecanismo de piñón-cremallera
Mecanismo de piñón cremallera

Dirección asistida - Haz clic en el dibujo para ver detalles
Detalle del piñón-cremallera de la dirección asistida
Motor de una puerta corredera
Puerta corredera
Este mecanismo lo podemos encontrar también en objetos simples y cotidianos como el sacacorchos de la imagen. Este sacacorchos consta de dos palancas que llevan en su extremo un piñón que engrana con una cremallera. Al bajar las palancas, en realidad, obligamos a girar a los piñones los cuales, a su vez, desplazan la cremallera que arrastra el tapón de la botella.Biela Manivela
<!--[endif]--><!--[if gte mso 9]> Normal 0 21 false false false MicrosoftInternetExplorer4 <![endif]--><!--[if gte mso 9]> <![endif]--><!--[endif]--><!--[if gte mso 9]> <![endif]--><!--[if gte mso 9]> <![endif]-->
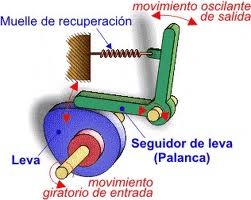
Este mecanismo transforma el movimiento circular de la manivela en un movimiento alternativo del
Conjunto cigüeñal, biela y pistón
pie de una biela, que es una barra rígida, cuyo extremo está articulado y unido a la manivela. Este sistema también funciona a la inversa, es decir, transforma el movimiento alternativo de la biela en un movimiento de rotación de la manivela. Este mecanismo es esencial, pues se utiliza en motores de combustión interna, máquinas de vapor, máquinas de coser, herramientas mecánicas, etc. En el caso de los motores de los coches, la manivela es sustituida por el cigüeñal, que arrastra los pistones del motor a través de las bielas.
En la siguiente imágen se puede observar el mecanismo en acción en el que se aprecia la biela (de color gris) unida a la manivela (circular) por un extremo. El otro extremo de la biela tiene el movimiento alternativo ya citado en el que podría fijarse, por ejemplo, un pistón.
En la imagen inferior puedes observar una analogía entre el mecanismo de biela manivela y el pedal de una bicicleta. En este caso, tus piernas actuarían como bielas que poseen movimiento alternativo, actuando a la vez como elemento motriz, mientras que los pedales hacen las veces de manivela y elemento conducido.
 En la siguiente imagen animada puedes apreciar el mecanismo con un ejemplo más realista.
En la siguiente imagen animada puedes apreciar el mecanismo con un ejemplo más realista.
Conjunto cigüeñal, biela y pistón
 El cigüeñal
El cigüeñal
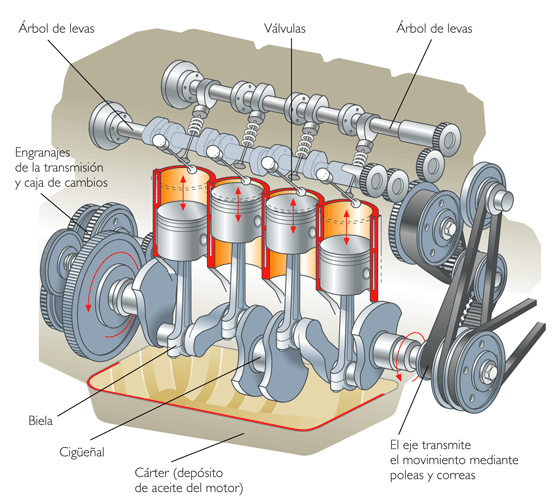
El cigüeñal es un árbol de transmisión que junto con las bielas transforma el movimiento alternativo en circular, o viceversa. En realidad consiste en un conjunto de manivelas. Cada manivela consta de una parte llamada muñequilla y dos brazos que acaban en el eje giratorio del cigüeñal. Cada muñequilla se une una biela, la cual a su vez está unida por el otro extremo a un pistón. Observa la imagen y lo entenderás inmediatamente…

Los cigüeñales se utilizan extensamente en los motores de combustión de los automóviles, donde el movimiento lineal de los pistones dentro de los cilindros se trasmite a las bielas y se transforma en un movimiento rotatorio del cigüeñal que, a su vez, se transmite a las ruedas y otros elementos como un volante de inercia. El cigüeñal es un elemento estructural del motor.
En la siguiente imagen puedes apreciar un cigüeñal real unido a sus respectivas bielas
 Al observar esta imagen, nos viene a la cabeza la imagen del mecanismo de biela-manivela… y es que, al fin y al cabo, este conjunto de pistones, bielas y cigüeñal se puede considerar como una serie de mecanismos biela-manivela que funcionan de forma simultánea y sincronizada.
Al observar esta imagen, nos viene a la cabeza la imagen del mecanismo de biela-manivela… y es que, al fin y al cabo, este conjunto de pistones, bielas y cigüeñal se puede considerar como una serie de mecanismos biela-manivela que funcionan de forma simultánea y sincronizada. Mecanismo de tornillo-tuerca
Mecanismo de tornillo-tuerca
 El mecanismo tornillo-tuerca, conocido también como husillo-tuerca es un mecanismo de transformación de circular a lineal compuesto por una tuerca alojada en un eje roscado (tornillo).
Si el tornillo gira y se mantiene fija lo orientación de la tuerca, el tornillo avanza con movimiento rectilíneo dentro de ella.
Por otra parte, si se hace girar la tuerca, manteniendo fija la orientación del tornillo, aquella avanzará por fuera de ésta. Este mecanismo es muy común en nuestro entorno, pues lo podemos encontrar en infinidad de máquinas y artilugios.
Evidentemente, este mecanismo es irreversible, es decir, no se puede convertir el movimiento lineal de ninguno de los elementos en circular.
El avance depende depende de dos factores:
El mecanismo tornillo-tuerca, conocido también como husillo-tuerca es un mecanismo de transformación de circular a lineal compuesto por una tuerca alojada en un eje roscado (tornillo).
Si el tornillo gira y se mantiene fija lo orientación de la tuerca, el tornillo avanza con movimiento rectilíneo dentro de ella.
Por otra parte, si se hace girar la tuerca, manteniendo fija la orientación del tornillo, aquella avanzará por fuera de ésta. Este mecanismo es muy común en nuestro entorno, pues lo podemos encontrar en infinidad de máquinas y artilugios.
Evidentemente, este mecanismo es irreversible, es decir, no se puede convertir el movimiento lineal de ninguno de los elementos en circular.
El avance depende depende de dos factores:
-
La velocidad de giro del elemento motriz.
-
El paso de la rosca del tornillo, es decir, la distancia que existe entre dos crestas de la rosca del tornillo. Cuando mayor sea el paso, mayor será la velocidad de avance.
Veamos algunos instrumentos que incorporan este mecanismo:


El sargento: Esta herramienta de sujeción de piezas que se van a mecanizar, muy común en cualquier aula de tecnología, tiene este mecanismo como elemento esencial. En este caso, el elemento motriz es el tornillo que, al girarlo manualmente, avanza dentro de la tuerca que posee el brazo de la corredera.
La bigotera: Este instrumento, muy común en las clases de plástica, regula la abertura de sus brazos gracias al giro de un tornillo que mantiene su posición y que actúa como elemento motriz. Las tuercas se encuentran en los brazos del compás, las cuales avanzan dentro del tornillo.
 El gato mecánico: En este caso, al girar la manivela, gira la tuerca, que actúa como elemento motriz y, a la vez, avanza por el tornillo linealmente de forma que se cierran las barras articuladas que levantan el automóvil.
El gato mecánico: En este caso, al girar la manivela, gira la tuerca, que actúa como elemento motriz y, a la vez, avanza por el tornillo linealmente de forma que se cierran las barras articuladas que levantan el automóvil.
El grifo de rosca: El elemento es el mando giratorio del grifo, acoplado a un tornillo (elemento motriz) que avanza linealmente y gira dentro de una tuerca. En el extremo del tornillo hay una zapata de caucho que termina cerrando el paso
Leer más: http://trabajosdeinformatica.webnode.com.co/proceso/mecanismo-de-transmision-de-movimiento/
Crea tu propia web gratis: http://www.webnode.es

 El mecanismo tornillo-tuerca, conocido también como husillo-tuerca es un mecanismo de transformación de circular a lineal compuesto por una tuerca alojada en un eje roscado (tornillo).
El mecanismo tornillo-tuerca, conocido también como husillo-tuerca es un mecanismo de transformación de circular a lineal compuesto por una tuerca alojada en un eje roscado (tornillo).
La velocidad de giro del elemento motriz.
El paso de la rosca del tornillo, es decir, la distancia que existe entre dos crestas de la rosca del tornillo. Cuando mayor sea el paso, mayor será la velocidad de avance.


El sargento: Esta herramienta de sujeción de piezas que se van a mecanizar, muy común en cualquier aula de tecnología, tiene este mecanismo como elemento esencial. En este caso, el elemento motriz es el tornillo que, al girarlo manualmente, avanza dentro de la tuerca que posee el brazo de la corredera.
La bigotera: Este instrumento, muy común en las clases de plástica, regula la abertura de sus brazos gracias al giro de un tornillo que mantiene su posición y que actúa como elemento motriz. Las tuercas se encuentran en los brazos del compás, las cuales avanzan dentro del tornillo.

El gato mecánico: En este caso, al girar la manivela, gira la tuerca, que actúa como elemento motriz y, a la vez, avanza por el tornillo linealmente de forma que se cierran las barras articuladas que levantan el automóvil.


 *
*